
Using timers TMR0, TMR1 and TMR2. Using interrupts, declaring new function...
If you have read the previous example, you probably have noticed a disadvantage of providing
delays using loops. In all those cases,
the microcontroller is ‘captive’ and does nothing. It simply waits for some time to pass. Such waste of time is an unacceptable
luxury and some other method should be applied therefore.
Do you remember
the story about timers? Interrupts? This example makes links between them in a practical
way. The schematic is still the same as well as the challenge. It is necessary
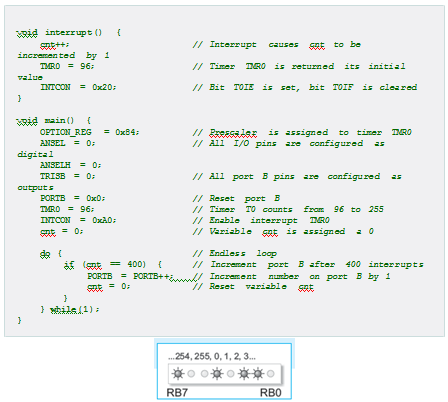
to provide a delay long enough to notice changes on a port. Timer TMR0 with assigned prescaler
is used for this purpose. An interrupt is generated on every timer register overflow and every interrupt routine automatically increments the cnt variable by 1. When it’s value reaches
400, the port B is incremented by 1. The whole procedure is performed ‘behind the scenes’,
which enables the microcontroller to do something else.


Interrupt occurs on every timer register
TMR0 overflow.


In this case,
an interrupt is enabled
after the timer register
TMR1 (TMR1H, TMR1L) overflow
occurs. Combination of bits changing on port B is different from that in the previous example.


This time, an interrupt occurs
after timer register TMR2
overflow occurs.
The Replace function, which normally
doesn’t belong to C, is used in this example to invert port
pins state.
Written by Admin
ChromeGT is a modern, powerful and professional Blogger template made for your Portfolio, Business or almost any other kind of website.











0 komentar: