Aplikasi LED dan Switch
1. Tujuan [kembali]
a. Menyelidiki Karakteristik kerja LED dan Switch
b. Memahami prinsip kerja dari Mikroprosesor dan Mikrokontroler
c. Mampu mebuat rangkaian sederhana tentang LED dan Switch
2. Alat dan Bahan [kembali]
a. PIC 16F887 dan PIC 16F877
b. Button
c. Crystal
d. Kapasitor
e. LED
f. Switch
g. Jumper
h. Resistor
i. dll
3. Dasar Teori [kembali]
a. PIC16F887 adalah salah satu produk terbaru dari Microchip. Ini menampilkan semua komponen yang biasanya dimiliki mikrokontroler modern. Untuk harga murah, beragam aplikasi, kualitas tinggi dan ketersediaan yang mudah, ini adalah solusi ideal untuk aplikasi seperti : pengendalian berbagai proses di industri, perangkat kontrol mesin, pengukuran nilai yang berbeda, dll. Beberapa fitur utamanya adalah tercantum di bawah ini.
- Arsitektur RISC
b. Semua intruksi siklus tunggal kecuali cabang
- Frekuensi operasi 0-20 MHz
- Osilator internal presisi
b. Rentang frekuensi perangkat lunak yang dipilih 8 MHz sampai 31 KHz
- Power supply voltage 2.0-5.5 V
- Hemat Daya Mode Tidur
- Brown-out Reset (BOR) dengan pilihan kontrol perangkat lunak
- 35 pin input/output
- Memori ROM 8k dalam teknologi FLASH
- Opsi Pemograman Serial-Circuit
- Memori EPROM 256 byte
- 368 byte memori RAM
- A/D converter
- 3 timer/counter independen

c. Crystal adalah komponen Elektronika yang memiliki fungsi sama dengan Resonator. yaitu untuk menghasilkan denyut atau detak pada Komponen Elektronika yang membutuhkan detak Clock. Crystal memiliki 2 kaki, yang jika digunakan pada IC mikrokontroler maka kedua kaki pin koneksikan dengan XTAL1 dan XTAL 2. Kelebihan Crystal adalah detaknya relatif stabil. tetapi kelemahannya adalah rangkaian menjadi sedikit rumit, karena membutuhkan tambahan Kapasitor untuk menstabilkan detak tang dihasilkan oleh crystal.
Crystal memiliki banyak nilai dengan satuan Mhz. untuk penggunaan pada Mikrokontroler biasanya menggunakan crystal dengan nilai detak 11.059200 Mhz, sedangkan untuk Arduino biasanya menggunakan crystal bernilai 16.000000 Mhz.

Adalah switch yang dapat menghubungkan 3 Jalur sekaligus jika ditekan, dan akan memutuskan jika ditekan sekali lagi. itu artinya push button ini saat ditekan pertama akan tertahan, dan jika ditekan sekali lagi akan terlepas.

4. Simulasi [kembali]

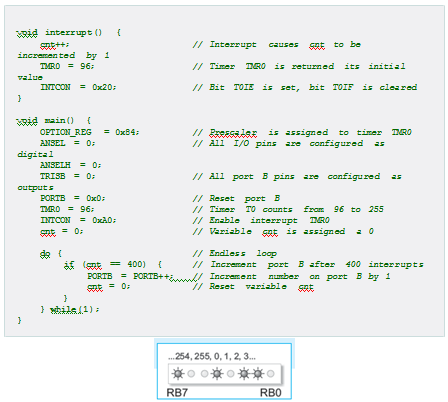
5. Program dan Listing [kembali]
void main(){ //Fungsi Utama
ANSEL=0; //I/O dilakukan secara digital
ANSELH=0;
PORTB=0b01010101; //LED 1,3,5,7 akan hidup dan selebihnya mati
TRISB=0; //PortB sebagai Output
}
6. Flowchart [kembali]

7. Video [kembali]
8. Unduhan [kembali]
File rangkaian, HTML, Program download Disini Read more